Some time ago, we described a procedure to manually create a look up table for the laser power slider to achieve linear power. Now, if you have a Thorlabs’ PM100D meter your job has been made much easier, as Scanbox can perform the calibration automatically.
As a first step, you will need download and install the software for the PM100D.
Connect the power meter to the computer with an USB cable and start up Matlab. If you launch the Test and Measurement Tool (tmtool) you should see the instrument listed under VISA | USB as shown in the figure below.

Make a note of the identification string. Edit scanbox_config and set the variable ‘pmeter_id’ to this ID string. In the present example, we would have a line that reads:
sbconfig.pmeter_id = 'USB0::0x1313::0x8078::P0012223::0::INSTR'; % PM100D power meter ID (leave blank if not available)Launch Scanbox and scroll through the different panels. You should now see a panel labeled Power Meter and, within the panel there is a button labeled Calibration.
To use the calibration tool place the sensor of the PM100D at the output of the pockels cell. Make sure the ThorLabs power meter GUI is not running. Set the bias of the pockels controller is set so you get minimum power when Scanbox is not scanning. Now, make sure the laser shutter is open. You can now hit the Calibration button, sit back and relax.
Scanbox will start changing the DAC values and reading the power at each setting. A graph will be plotted online as the process takes place. At the end you will get a graph that looks like this:
The blue dots show the raw data, while the red line is a fit to the points which is used to compute the linearization table.
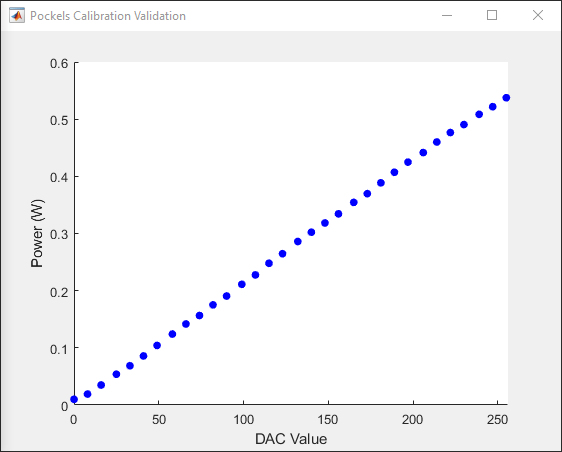
Immediately after the look up table is computed, Scanbox will perform a validation step, measuring the power at the different settings after installing the new lookup table. Once the measurements are complete, you should get a pretty linear graph, like this:
Scanbox saves the resulting linearization table in pockelscal.mat, so next time you start Scanbox that lookup table will be automatically loaded (overriding whatever settings you have in the configuration file).
That’s it! (Remember to take the sensor out of the path when you are done!)