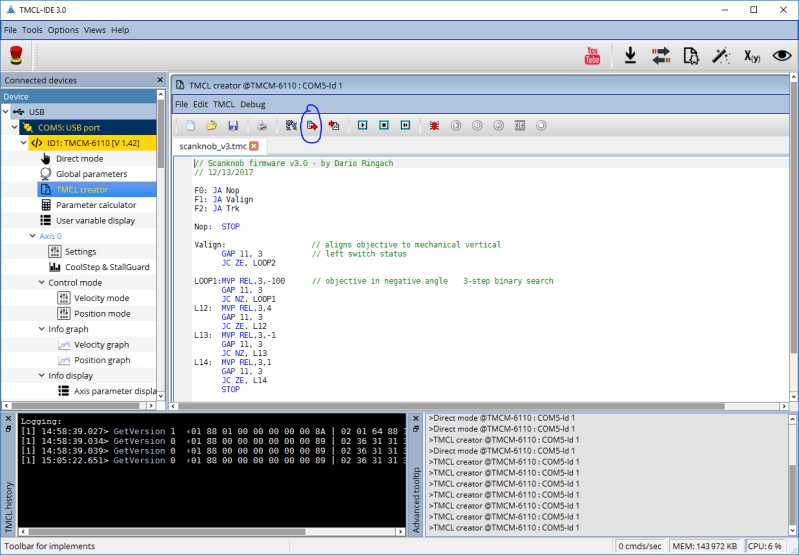
We are asking all Scanbox users to update to the latest version of Scanbox which incorporates important updates to the motor box code, including: Update of the Trinamic firmware Update of the motor box application code Update of the motor box interface code in Scanbox Please proceed as follows: If you don’t have the Trinamic…
Read More